
After our trip to the Cook Islands, only one of our four ROVs were functioning. Then there was the issue of nearly half of our team having graduated, leaving only a few students that are able to repair our units. In addition to the necessary ROV repairs, Paul’s fixed wing mapping UAV (the Snowy Plover) is in the need of a few repairs and upgrades as well.

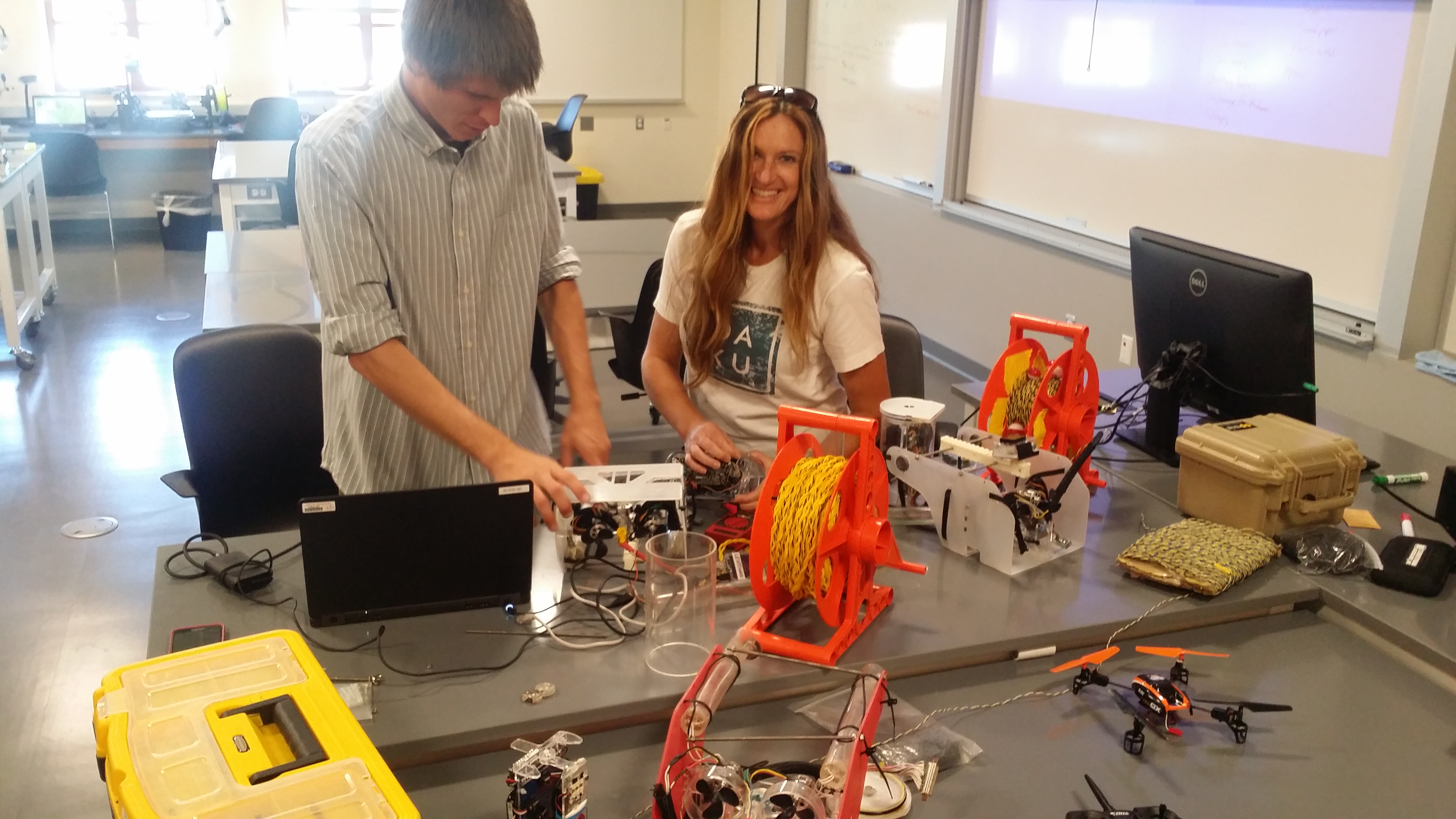
The team now has three direct faculty members: Dr. Sean Anderson, Dr. David Claveau and Dr. Kiki Patsch along with team manager Paul Spaur. Our returning students include Tim Holcombe, Rebecca Smith, and Chase Tillman. They are joined by new team members Nicole Gonzales, Karen Ramirez, and Tara Fay. There has been plenty of work to keep the team busy; setting up our new lab, calibrating interments, and training these new comers in the wide breadth of skills used in our AARR laboratory.

In addition to learning new building and repairing skills, our new team members are learning the basics of professional and responsible use of aerial and submarine remotely piloted systems. There are many rules, regulations and guidelines to follow when operating these powerful tools and our team strives to perform research using the utmost of safety. Our AARR professional standards are typically much higher than the operating conditions regulatory or oversight bodies expects of us.

All of the new team members have had the chance to start up and operate both our OpenROV aquatic, and Blade 180QX quadcopter aerial units. Once our entire stable of units are repaired, we will focus on tailoring them to meet specific research goals for this year’s projects as well as focusing on getting them more pilot training (aka “stick time”).
We’re working on several new projects with our tethered ROVs and autonomous vehicles: hydrophone arrays for measuring vessel noise, water quality probes to test the water around desalination plants, and continuous plankton pumps for long term characterization!