The team is working very hard to prepare for the trip, we are bringing 3 of our OpenROVs, and two our UAVs including Paul’s aerial mapping UAV. Our ROVs have all been through the ringer in the last few months and as we always have funding, we have been amassing the parts, piece by piece. In addition to needing the parts, our parent laboratory, the PIRatE lab, has been exhibiting research at events, performing ecological surveys at the Refugio Oil Spill incident, all while moving into many brand new laboratories. This is great news because we finally will have a dedicated space to work on our Remotely Piloted Systems (RPS) endeavors. Currently our robots live next to sand, oil and animal samples, marine experiment tanks, and much more! The final batch of parts arrived last week, along with some upgrade parts that we’ve been waiting for.

In the next 5 days, the team must accomplish the following:
- Repair the three main ROVs: The Black PERL, Leviathan and R.U.M.
- Finish 3D modeling and printing new parts for the ROVs and UAVs
- Create new tether management systems for the main ROVs
- Create a neutrally buoyant tether with enough tension to recover the ROV
- Build and set up the aerial mapping UAV
- Field test all units before leaving
So far the damaged parts consist of:
- Two Beagle Bones
- Two tethers
- Wiring harness and end caps
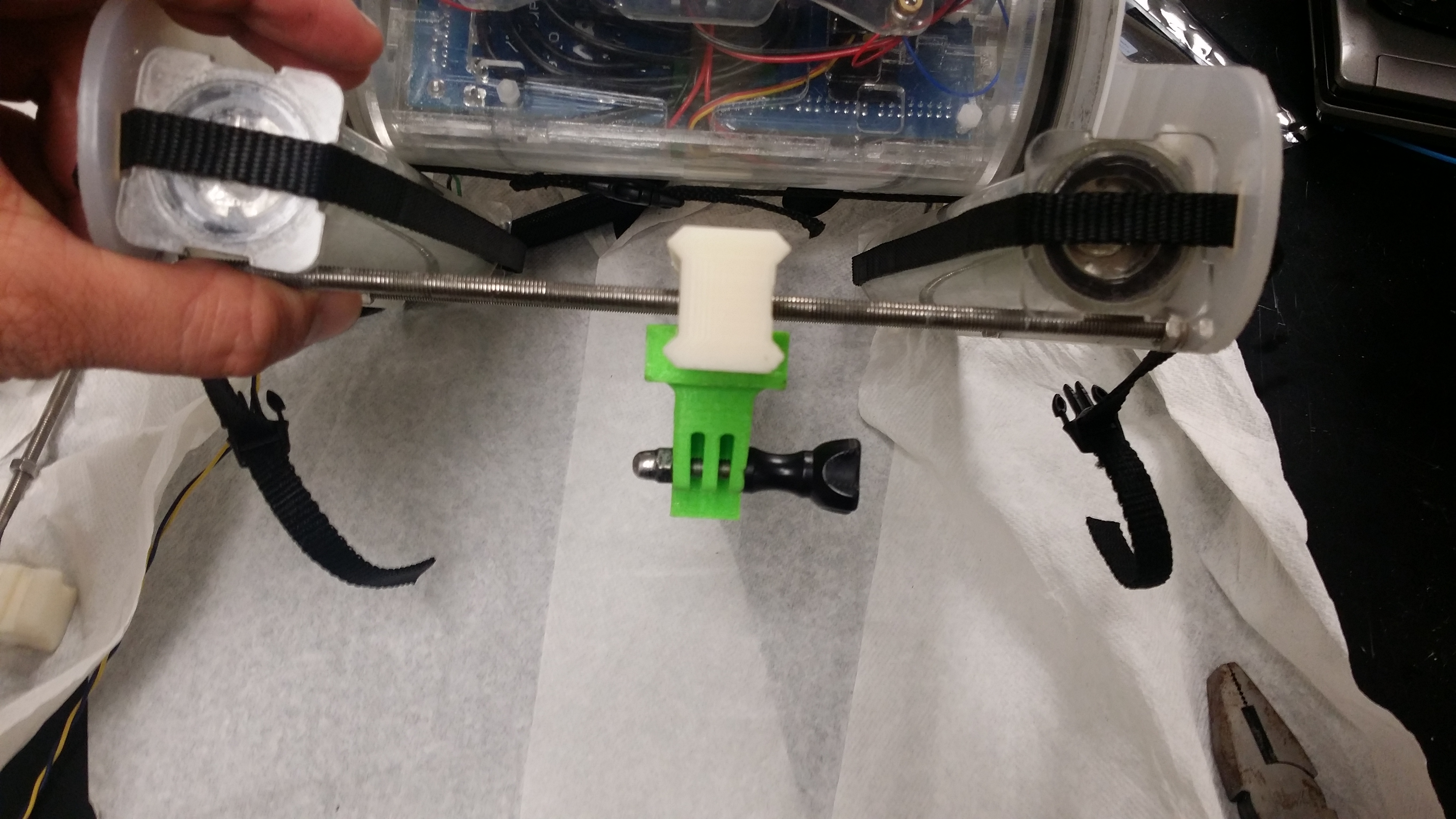
R.U.M. is fully operational and is in the process of being upgraded with Paul’s 3D printed accessory rail, and the new 2.0 IMU. The new rail can hold more than three GoPros or other equipment!
Leviathan is semi-operational and is awaiting tether replacement with the new neutrally buoyant tether. It has had the Blue Robotics motors replaced with the stock ones, and is awaiting the upgrade with the rail and IMU.
PERL is non-functional, the tether damage led to corrosion which reached into the electronics capsule. This unit will require a new wiring harness and end caps. This unit already had an older version of the accessory rail, so it will only receive the IMU upgrade.
The accessory rail is designed around a slotted rail, which bolts onto the payload bars of the ROV, then allows the payload to be positioned and bolted into place. This is especially important when trying to properly balance an ROV, and it opens the door for many options. The 3D file will be released in the near future on the OpenROV forums.