
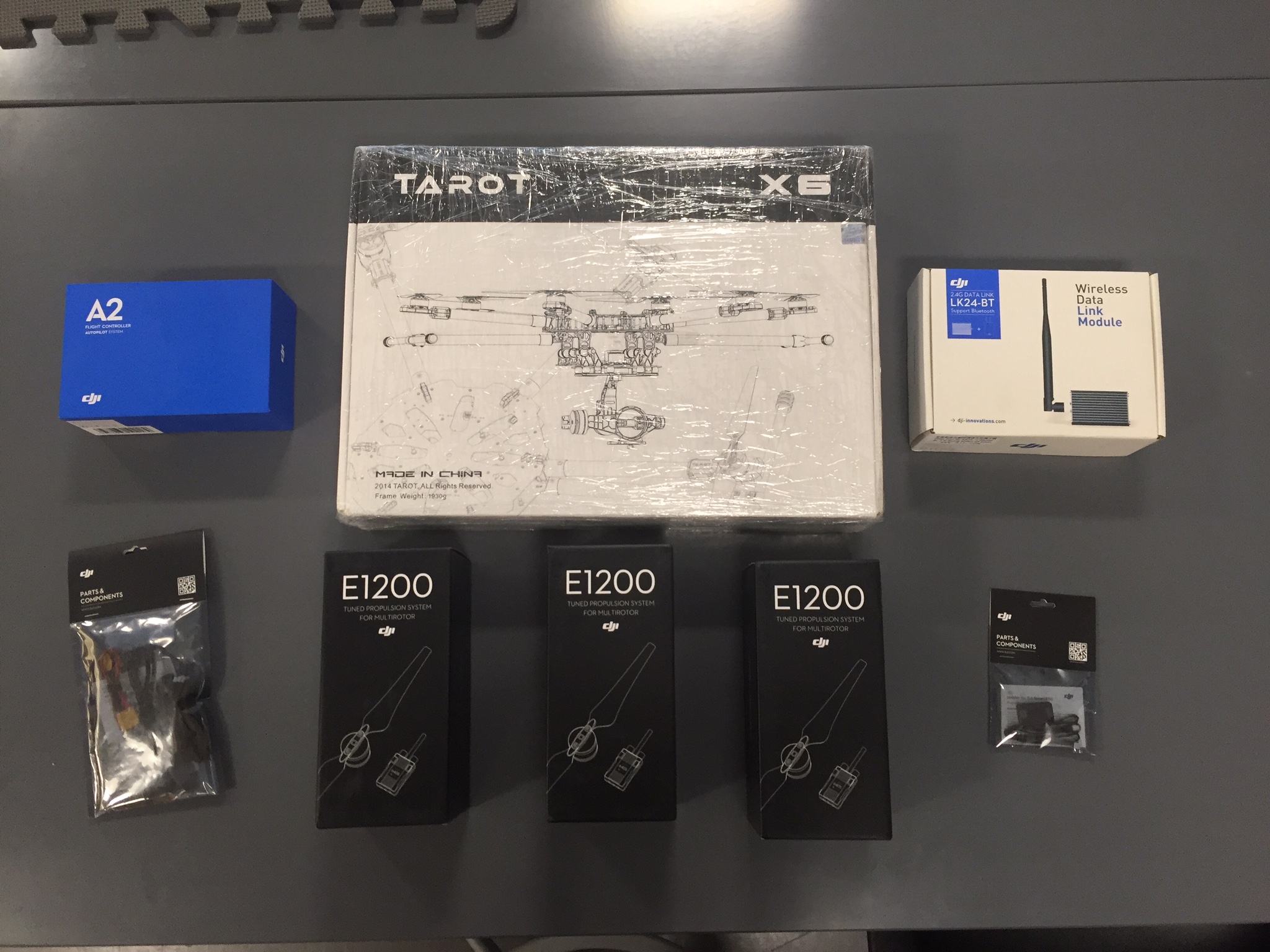
With all the struggles operating our previous LiDAR drone – the DJI S1000 octocopter – we have decided to partly scratch that design and go with a slightly smaller build. The new drone is a Tarot X6 hexacopter, and will feature an increased compatibility between electronics. The motors used be the DJI E1200, which will provide a much smoother flight combined with the new flight controller – the DJI A2. The smaller frame along with an increased stability should allow for a great combination to use the LiDAR, with an increased degree of portability.
Much thanks need to be given to those supportive of CSU’s COAST grant. This is the CSU system-wide affinity group for marine and coastal related activities, which integrates system-wide resources and promotes interdisciplinary multi-campus collaborations to advance our knowledge of coastal and marine resources and the processes that affect them. This build would not have been possible without this support, and we hope to use this drone and LiDAR combination to accurately map coastal changes. This should expand CSUCI’s influence in the realm of aerial mapping.
